|
Click here to download pictures of Ugo II: |
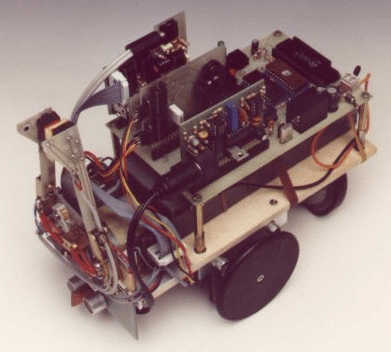
"Ugo II" is a small robot 25 cm long, 14 cm wide and
20 cm high.
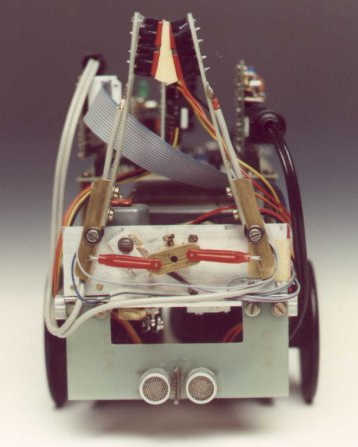
I had build it because I wanted to make experience with
ultrasound remote sensing.
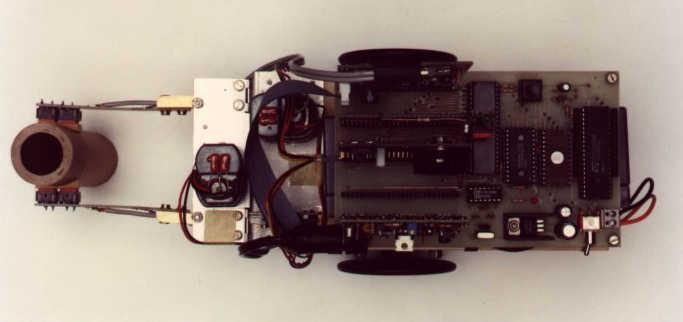
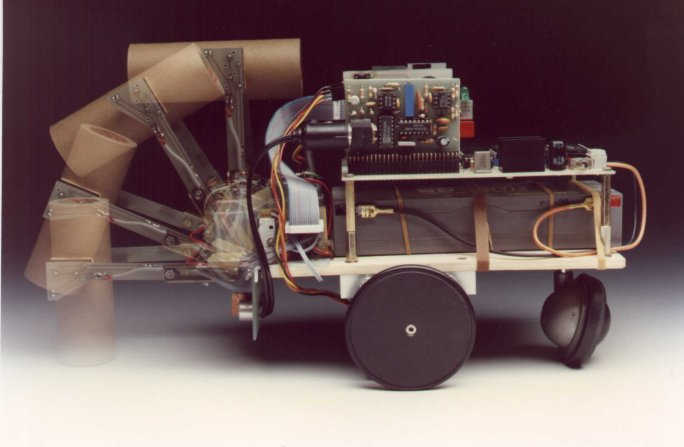
The robot task is to look for an object and catch it. The object
that I use is for instance a cardboard pipe 10 cm high and 5 cm
in diameter, placed by the robot at a distance up to 1.5 meters.
To accomplish its job the robot executes the following actions:
"Ugo II" is provided with
The robot stands on three wheels. Two are mounted on the sides,
directly on the stepper motors axes. The third one is a caster
and acts simply as a third point of balance.
The different movements of the robots are simply accomplished by
an appropriate control of the two stepper motors. When the two
motors turn simultaneously in the same direction, the robot moves
straight (forwards or backwards). When the two motors move in
opposite directions, the robot turns.
The pulses needed to control the stepper motors are generated by
software.
The Z80CPU was programmed in assembler. This time, after the experience done with "Ugo I", I had prepared an assembler compiler in Basic and I was also able to download the code from the PC to the control board via the RS232.
Email: riccardo.rocca@hotmail.com
{kind=link}
{kind=link}
{kind=link}