Penelope
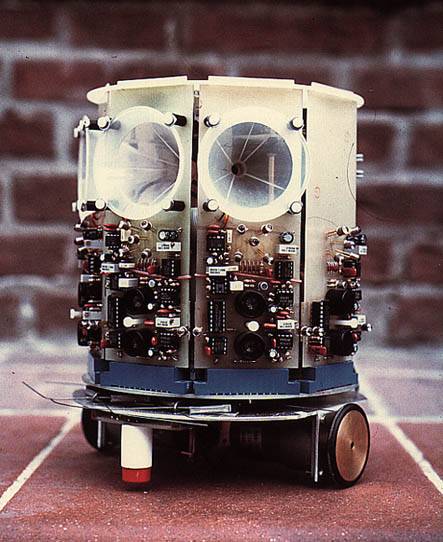
Penelope is a small robot 25 cm high and 20 cm in diameter. I
had built it in order to take part to a national microrobot
competition which was held in Pisa (Italy), in April ’93.
Its aim is to move autonomously, looking for light, sound and gas
sources, without hitting obstacles.
It is provided with:
- 5 sonars and 6 whiskers for obstacle avoidance
- 5 groups of directional light sensor, 3 directional
microphones with 4kHz filters and one gas sensor for
sources searching
- one compass and one odometer (=mileometer) for
positioning
- two DC motors for moving
- one 12V lead battery for power supply
- one Motorola micro-controller M68HC11, mounted on the
Motorola Evaluation Board (EVB) that provides the user
with:
- one 8KB EPROM
- one 8KB RAM
- connection to a PC serial port for debugging
Click here for a detailed description of
Sonar, Light and Sound sensors.
In order to check the numerous sensors and devices of Penelope
I developed a program in BASIC that communicates with the robot
via the PC serial port. In this way the robot can be driven with
the arrow keys of the PC keyboard, while the response of all
sensors is displayed on the PC screen.
Here is an example of what can be seen on the PC:
The screen is subdivided in three main regions:
- a grey square on the right represents the area where the
robot is actually moving;
the robot path is represented by the light-blue line,
which is showing a movement from the center of the square
towards the bottom-left corner.
In this example are also shown the positions of three
sources:
- light (yellow area)
- sound (green waves)
- gas (red area)
- five columns on the left represent the response of
sensors positioned around the robot, from the left, to
the front, to the right side:
- sonars (purple lines: the shorter are the lines,
the closer is an obstacle in front of them)
- sound sensors (green lines: the longer are the
lines, the stronger is a sound in front of them)
- light sensors (blue circles: filled with yellow
when a light hits them)
- gas sensor (red dot at the bottom: it widens when
gas is sensed)
- a data area at the bottom shows:
- direction of movement (forward, backward, left,
right)
- speed (0 = stop, 8 = fastest)
- distance measured in steps (1 step = 1.5 cm)
- position in X and Y calculated by the robot
itself (0 , 0 is the square center)
- heading according to the compass
Email: riccardo.rocca@hotmail.com
Back to Home Page